|
KLIPPEL ANALYZER SYSTEM DC Displacement with 3D-Distortion Measurement (DIS) |
|
|
|
Driver
Name: |
SB 12 |
|
Driver
Comment: |
|
|
Measurement: |
DIS
Fundamental, DC |
|
Measurement
Comment: |
Used for
analyzing DC offset and its causes |
|
Date: |
07/21/07 |
|
Time: |
19:45:59 |
Comments
Substantial DC offset or
rectification (17.5+mm) above resonance. This is probably caused by a
combination of the coil rest position, and extremely high compliance (Very low Fo). See additional documents for
more details and solutions.
Overview
The dc-component in the displacement will be generated dynamically if
nonlinearities (Bl(x)-product, compliance Cms(x) and Le(x)) have an
asymmetrical characteristic. At the resonance frequency the asymmetry of the
stiffness is usually the dominant source for DC. Above the resonance frequency
the force factor (Bl(x)-product) contributes more and more. If the motor
nonlinearity is large and the compliance is low the system becomes instable
f=2fs pushing the coil literally out to the gap. A generated dc-component will
destroy the optimal working point. For example a dc-component generated by
asymmetric stiffness may shift the voice coil position producing substantial
Bl-distortion at higher frequencies eventually.
Thus ensuring a small DC component is a essential requisition for
ensuring stable performance and low distortion in the large signal domain.
Physics of generating a
DC-displacement
Causes
There are
two mechanisms that generate a DC component in the displacement.
1. Any
asymmetry in the nonlinear characteristic of the electrical and mechanical parameters
(partly) rectifies the AC signal and produces a DC component as well as
second-order and higher-order distortion. The DC component has a much higher amplitude than any other harmonic and
intermodulation component if the transducer is excited by a complex signal. The
reason for this is that the DC component is accumulated by rectifying any
fundamental component whereas the other distortion components are distributed
over the whole frequency band.
2. An electro-dynamical
motor which has a perfect symmetrical Bl(x) characteristic may become unstable
if the stiffness of the suspension is very low and the driver is operated above
the resonance frequency. Any small disturbance at the rest position will ignite
the generation of a DC component and the coil slides down the Bl(x) slope until
the suspension has produced a restoring force large enough to stop this
process.
Orientation
The sign of
the DC displacement determines the direction of the voice coil shift. In this
application note positive displacements x denote shifts that move the coil away
from the backplate (coil out).
Direction
The
direction of the DC displacement depends on the shape (extrema, asymmetry) of
the transducer nonlinearities such as Cms(x), Bl(x) and Le(x) and on the
frequency of the excitation tone. The DC displacement caused by an asymmetric
compliance moves the coil always towards the direction of the stiffness
minimum. An asymmetric inductance causes a DC component that moves the coil
towards higher inductance values similar to the attraction force in a electromagnet. The DC component produced by the force
factor Bl(x) depends on the frequency of the fundamental component. For
frequencies below the resonance frequency the coil is moved towards the maximum
of the Bl(x) curve. This means that the coil is self-centring which is a nice
feature. unfortunately, the same motor will push the
coil away from the Bl(x) maximum for any frequency above the resonance.
Crossing
Point
Some
loudspeakers produce both a positive and negative DC displacement depending on
the frequency of the excitation tone. At the point where positive displacement
changes to negative and vice versa (crossing point) all the DC forces produced
by the different rectification processes cancel out each other. This point is
quite reproducible and almost independent of the magnitude of the DC component.
Influence of
the suspension creep
The DC
displacement of real world transducers varies with ongoing operation. After
starting to operate the transducer an initial DC component is generated. The
magnitude of the DC displacement depends among others on the stiffness of the suspension
at very low frequencies (f 0 Hz). However, the stiffness of the suspension of
real transducers is frequency dependent. Usually, the suspension is much
stiffer at the resonance frequency than at very low frequencies (corresponding
to very slow cone movements). Any displacement of the suspension will cause
changes in the geometry of the fibres of
the
rubber and fabric and the relocation time has a time constant in the order of
magnitude of 1s. The loss of stiffness at lower frequencies is described by the
creep factor which can be measured with LPM software module of the Klippel
Analyzer System. The DC force will produce a variable DC displacement depending
on the creep factor and the measurement time.
|
Effects of dominant nonlinearities |
||||
|
NONLINEARITY |
FREQUENCY OF THE EXCITATION TONE |
|||
|
f < fs |
f = fs |
f>fs |
f>>fs |
|
|
Bl(x) Motor |
moves to Bl(x) maximum |
no DC component |
moves coil away Bl(x) maximum (unstable) |
negligible |
|
Cms(x) Suspension |
moves coil to stiffness minimum |
moves coil to stiffness minimum |
negligible |
negligible |
|
Le(x) Reluctance force |
moves coil to Le(x) maximum |
negligible |
moves coil to Le(x) maximum |
moves coil to
Le(x) maximum |
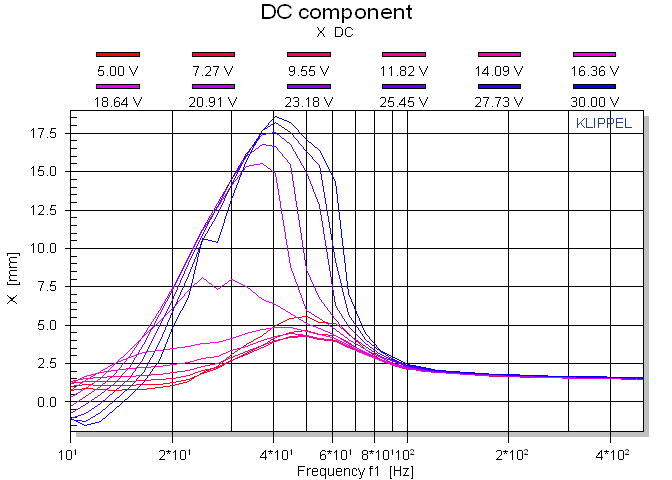
Fundamental (mm / Rms)
DC Component (mm Peak)
The
figure below shows the dc component in voice coil displacement for varied
voltage U and frequency f. of the sinusoidal excitation tone.